ZYJ-WZQ01型 工业机器人智能控制算法开发装置(五子棋人机对弈)
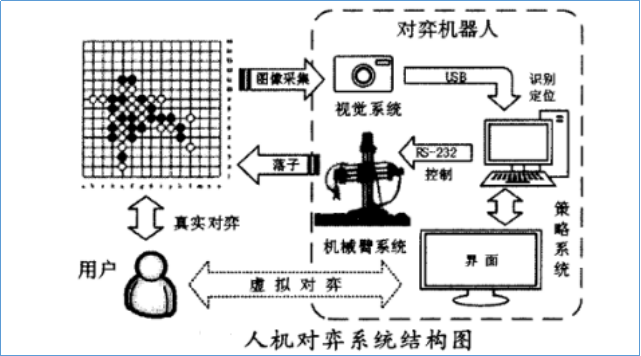
五子棋人机对弈系统主要包括视觉系统、策略系统和机器人系统三大功能模块。机器人通过摄像头实时捕捉棋子的位置变动,得到对手的出招,然后输入到五子棋算法中得到应招,之后通过控制机器人来完成棋子的定位和控制气缸完成吸放动作,从而实现了真正意义上的人机对弈。
视觉系统对棋盘进行图像采集,通过特定的图像识别算法对双方棋子进行识别与定位,得到当前的棋盘布局;策略系统对当前棋盘布局进行分析,调用智能对弈算法计算出*优落子位置坐标,换算成执行器的动作量并发送至机器人系统,由其完成取子、移动、落子等运动控制,从而在真实的棋盘上实现人机对弈。策略系统提供可视化的人机界面,能将视觉系统得到的棋盘布局图形化显现,实现对弈过程中界面与棋盘信息的同步。此外,用户亦可通过人机界面与策略系统进行纯软件的虚拟对弈,增强了趣味性,丰富了实验内容。
 一、装置组成
一、装置组成
智能机器人智能控制算法开发装置(五子棋人机对弈)由工业机器人、视觉识别系统、AI智能算法软件、运行处理器、人机对弈工作台组成。
二、主要实验项目
1.工业机器人编程操作
2.工业机器人与软件通讯应用
3.工业机器人复杂路径算法开发应用
4.视觉识别应用
5.工业视觉系统通讯应用
6.视觉识别的智能算法开发应用
相关产品
