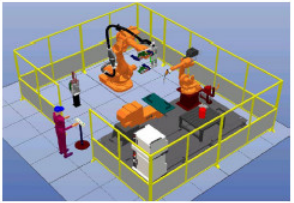
ZY-IRH03�� ���ӹ�ҵ������ʵѵϵͳƽ̨
1��ZY-RB1410M2004���ӹ�ҵ�����ˣ������ӵ�Դ��

���Կ�������RC5��
������ʾ������������������棩
����ʾ������10����
8in/8ou,2 A0 Combine I/O board������������
16in/6 out I/O board16��/16��I/O��
����������ƹ�����,��7��
�����˿��������� Robotare5
�ӿڣ�ʵ�ֳ������ؿ�ͨ��U�̻�Ӳ�����أ�
���ӵ�Դ����˿����
PSF315���亷ǹ
��ǹ,��˿����ǹTCPУ�豸
2.��������̨
����̨���
����̨����װ��
����̨������λ̨
3�������˼о�
4�������˰�װ�װ弰���̻�ѧ�ݶ�
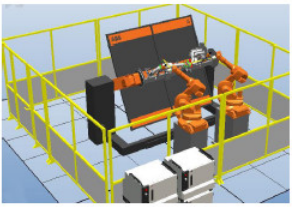
5�����Ӹ��뷿
�����ṹ���뷿
�Զ�����������
6��PLc����վ����ϵͳ
7�����ӵ��Ӽ���ϵͳ
8���̳������豸
������������
1��������Ա�����ÿ�����Ž��̶��о���,˫�ְ�ťȷ�ϣ�
2���о߽�����̶���
3������̨���빤��վ�Զ���������������,���ݺ�������,����������Ա���ⲿ������
4����������⺸��λ�����������й�����������ӣ�
5�������˴��ź�ǹ����ֱ�ߺ��졣����ǰ,���̖i����,�ų����Ӳ������к��̳�,����ʱ���������ֹ��������������ʱ��������Ա����ͨ���ⲿ��ʾ���۲캸�ӷ��ڵĺ�����������⺸�ӷ���Բ�����Ա�˺���
6��������ɺ����˴�����ȴ������ȴ������
7������̨�Ƴ�����վ��
8���о��ɿ��Ѻ��õ������
9��������Ա���Ѻ��õ�����ó���
����ʵѵ��Ŀ
��һ��Ӳ���İ�װ����ԣ�
1�������˵����İ�װ����ԣ�
2�������˰�װ����ԣ�
3�������˼о�(װ��)��װ����ԣ�
4�������˼о�(ƽ��켣)��װ����ԣ�
5�������˼о�(��ֱ�켣)��װ����ԣ�
6�������˺���ϵͳ�İ�װ����Լ�����
7�������˺���ϵͳ��˿���İ�װ����ԡ�
������������װ���
1�������˱�����������ĵ�����������ԣ�
2�������������Ϳ��ƹ������������ԣ�
3�������˼о�(װ��)������������Լ�����
4�������˼�ֻ(ƽ��켣)������������ԣ�
5�������˼�(��ֱ�켣)������������ԣ�
6�������˺���ϵͳ������������Լ�����
7����˿������ϵͳ����������ԡ�
��������̵��Ժ�Ӧ��
1�������˱�̵��������İ�װ��
2��ͨ��ʾ�����Ի����˵��������̵��ԣ�
3���ʹ�����������Ի������������̵��ԣ�
4��ͨ��U��Ի����������Ŀ��ƣ�
5�������˿������ݿ�Ľ�����Ӧ�ã�
6��������װ�����еı�д��
7��������ƽ�桢��ֱ�켣���еı�д��
8���ɱ�̿���������ı�д����ơ�
��ز�Ʒ
