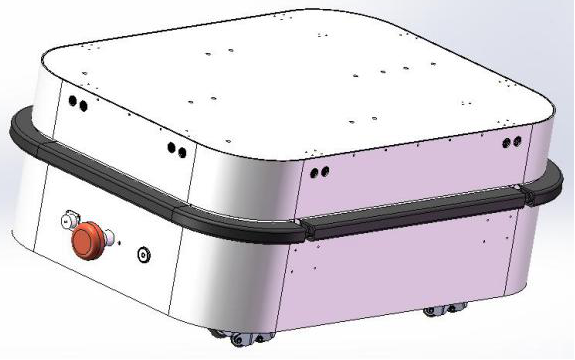
ZYAI-BCD01型 AI机器人底盘开发平台
工业级模块化机器人底盘控制开发平台是一款基于ROS平台的工业级移动底盘方案;适用于机电相关、计算机专业、人工智能等学科,进行传感器、机器人学、ROS系统、人工智能、工业级ROS平台的机器人地盘、机械臂,教学、研究及应用的工业级模块化机器人组件;可作为人工智能、软件工程、现代物流、工业AGV、医疗、服务等新工科专业的实训平台。
 二、AI机器人底盘开发平台产品特点:
二、AI机器人底盘开发平台产品特点:
1.驱动方式:多轮驱动
行走方式:全向移动
2.全向移动底盘:可支持循迹、避障、路径规划、激光雷达扫描,地图自构建、视觉追踪、远程遥控视频传输
3.移动抓取方案:移动底盘与机械臂完美搭配,可实现机器人移动抓取。
4. 控制系统:采用工控系统,预装ros操作系统,例程完整
5.教学支持:
(1)ros系统教学,工业机械臂教学,工业底盘教学。
(2)具备移动导航、目标识别与操作的服务机器人系统
(3)能够进行目标分类拣选的物流机器人系统
(4)具备干预操作的移动医疗机器人系统
(5)基于机器学习人工智能机器人系统
三、产品构成:
1.模块化的机器人控制开发平台:全向移动底盘
2.主机平台:PC级工控主板、8路无刷电机驱动器、大容量锂电池、激光雷达接口、轮接口、二维码惯性导航接口、双目视觉接口以及机械臂接口;
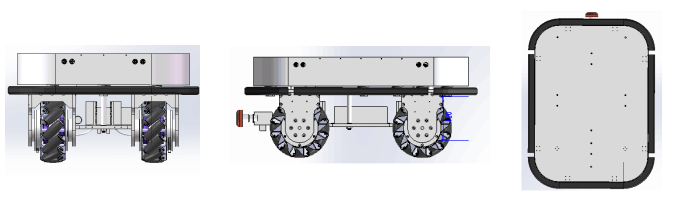
3.麦克纳姆轮组件:麦克纳姆轮、无刷电机;
4.传感器:激光雷达(标配)、摄像头(标配)、双目摄像头(选配)。
四、性能系数:
1.移动底盘参数:
尺寸:700x500x300mm;自重:60kg;载重:100kg;续航:4小时;续航:约15km;车速:1m/s;*高转向速度:100°/s;工作电压:24V;电量:25Ah待机时间;充电时长:12小时;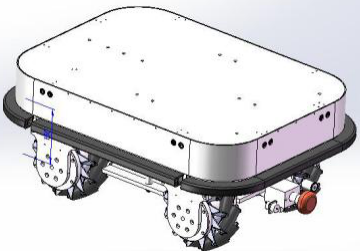
2.主机性能参数:
Intel® Celeron™ N3150(1.6GHz)四核CPU;4G DDR3 1600MHz内存;120G硬盘;USB3.0 x2、USB2.0 x2、VGA显示接口 x1、DVI-D显示接口 x1、音频接口 x3(输入,输出,麦克风)、COM接口 x2、RJ-45网络接口 x2。
3.定位导航:二维码惯性导航;
4.安全防护:机械防撞条、超声测距、激光雷达;
五、课程设置:
六、软件相关方案:
主题
实验内容
ROS基础学习
1. ROS机器人操作系统简介
2. ROS系统基本结构
3. 建立第一个ROS系统软件包
4. ROS话题(topic)机制
5. ROS服务(service)机制
6. 建立机器人模型
ROS中的机器人导航实验一
1. 机器人导航的基本概念
2. 地图构建
3. 定位
4. 路径规划1――全局路径规划
5. 路径规划2――局部路径规划
6. 建立一个导航工程
ROS中的机器人视觉实验
1. 追踪小球
2. 循线
3. 平面及物体识别
4. 面部检测与追踪
5. 面部识别
ROS中的机器人导航操作实验二
1. 二维码惯性导航
2.
基于ROS操作系统、ROS系统使用基础、ROS中机器人导航基础内容(需要雷达)、ROS中操作机械臂基础内容、ROS中视觉基础内容(需要摄像头/双目摄像头)、基于ROS的应用级机器人开发。
相关产品
